
【ほぼ週刊企画】Robiをつくる 第16号 ~左前腕のつづき~
だいぶ梅雨らしくなってきましたね。どうも、店員です。
今週のRobi誌面では、RobiやMANOI、クロイノなど、ロボットクリエイター高橋智隆氏が作るロボットで採用されてきた歩行法「SHIN-Walk」が解説されています。
意外と解説されることが少なかった情報ですので、ロボットに馴染みの無かった方はぜひご覧くださいな。
今号もサーボ号なのです!

今回の付属パーツはサーボモーター1個のみ。前号で組み立てた左前腕の続きをやっていきます。
なお、サーボケーブルを挿してID設定をする作業がありますが、度々やってきたので省略!因みにサーボIDは「21」です。
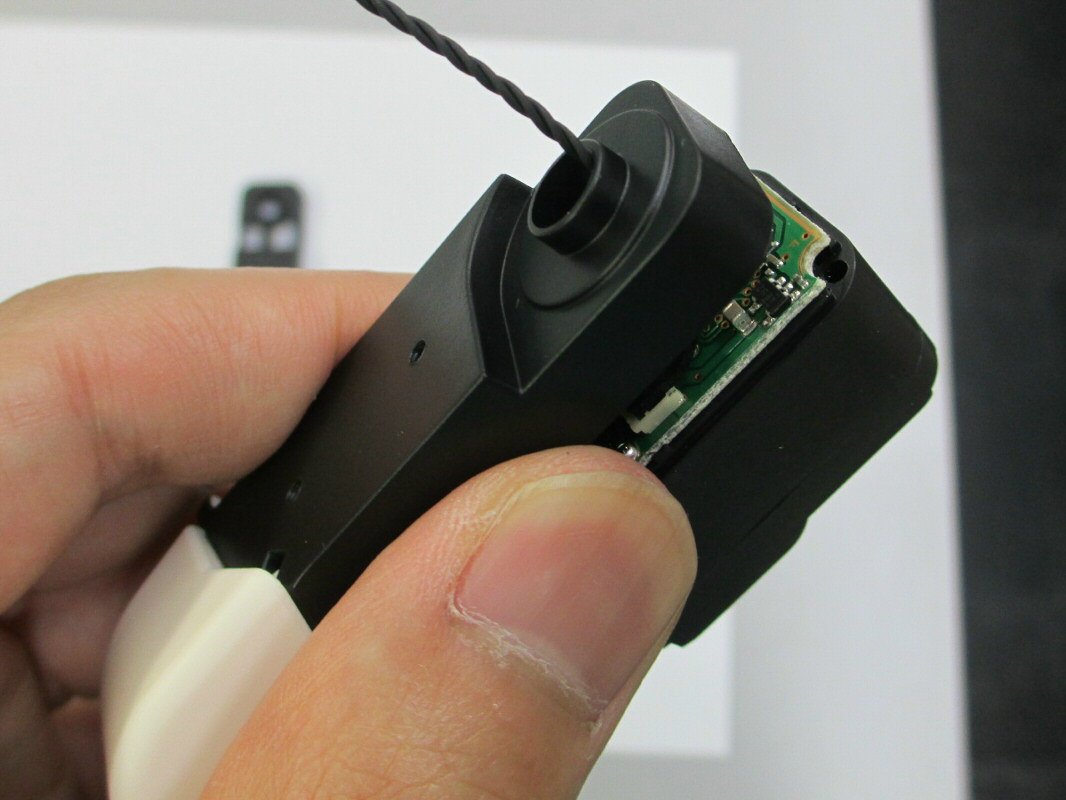
左前腕にサーボをネジ留め!
というわけで手っ取り早く。
前腕フレームの穴にケーブルを通したあと、サーボをはめ込んでネジ留めするだけです。
まだ右腕との違いは見当たりません。
ノルマ達成~。

今回の作業はここまで。
次回も引き続き左腕です。
それでは、また来週!
参考:ディアゴスティーニ・ジャパン公式動画
『第16号 左前腕フレームにサーボモーターを取り付ける』
『第16号 左前腕フレームにサーボモーターを取り付ける』
...次回へ続く!