
【ほぼ週刊企画】Robiをつくる 第27号 ~右足をつくる~
どうも店員です。
気付けばROBO-ONEがもう目前でした。
9月14日(土)・15日(日)に江東区青海の日本科学未来館7FみらいCANホールで開催です。
9月の真ん中にある連休はぜひROBO-ONEへ!
ROBO-ONE OFFCIAL SITE: http://www.robo-one.com/
まずは部品確認を!

今回も付属の部品確認から。
左から右足カバー、右足パネル、ネジ3種類です。
M2×6mm皿ネジとM2×7mm皿ネジがあるので、取り違えないように注意です。

下の写真が使うものを全部並べた写真です。第24号から黙々と(?)作っていた物たちがここに集結。
サーボ二つを含むこれらを合体させて右足を作ります。
足パーツに横回転のサーボと足首を取り付けます。
右足パネルに横回転サーボを取り付けていきます。
ケーブルをパネルにある細い溝に通してから、サーボをスペースにはめます。
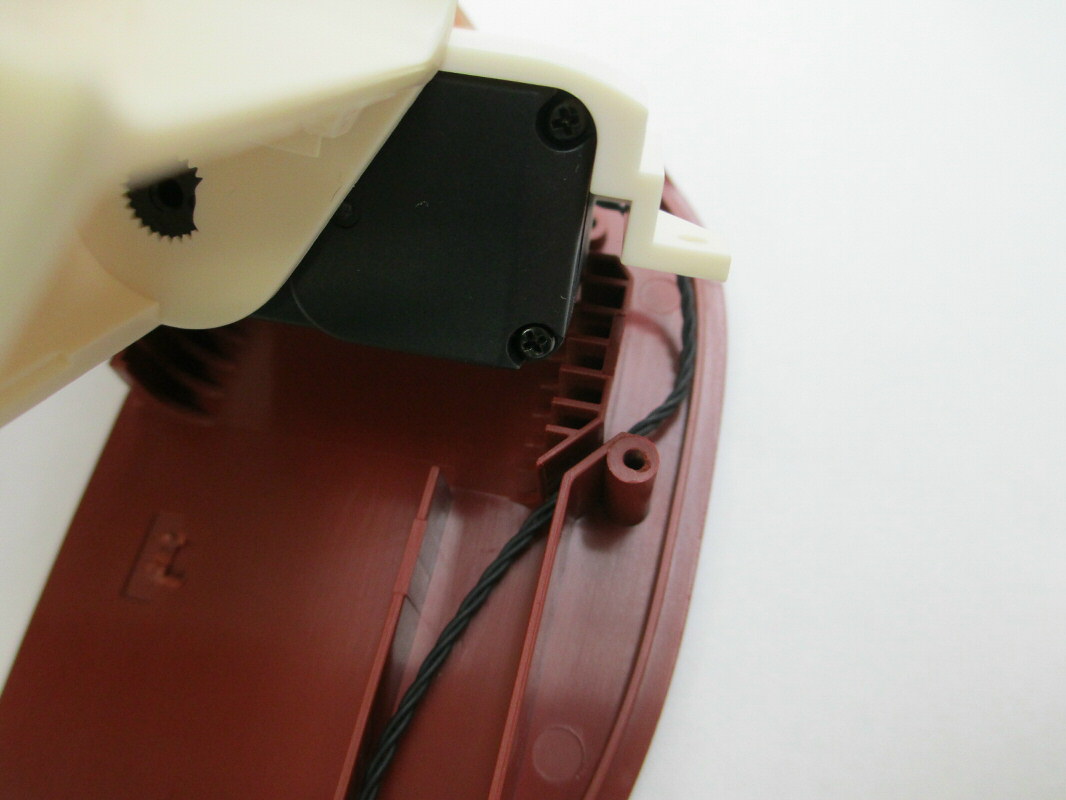
右足首フレームを外側に倒し、足首ジョイントをフレームの丸い穴とパネルにはめ込みます。
このとき、フレーム側を軽く浮かせながらはめていきます。

M2×6mmなべねじで、足首カバーとジョイントを右足パネルにネジ留めします。
先に足首カバーを締めるように書かれていますが、ちょっと手がすべるだけでジョイントがはずれてしまうので、まずはジョイントを仮留めしたほうが良いでしょう。
足首側の縦回転サーボもくっつけます。

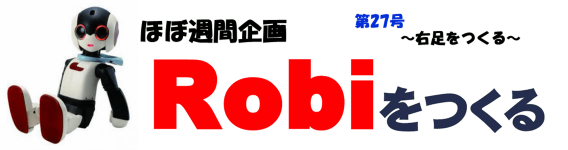
ケーブルを写真の通りにフレームの穴に通します。
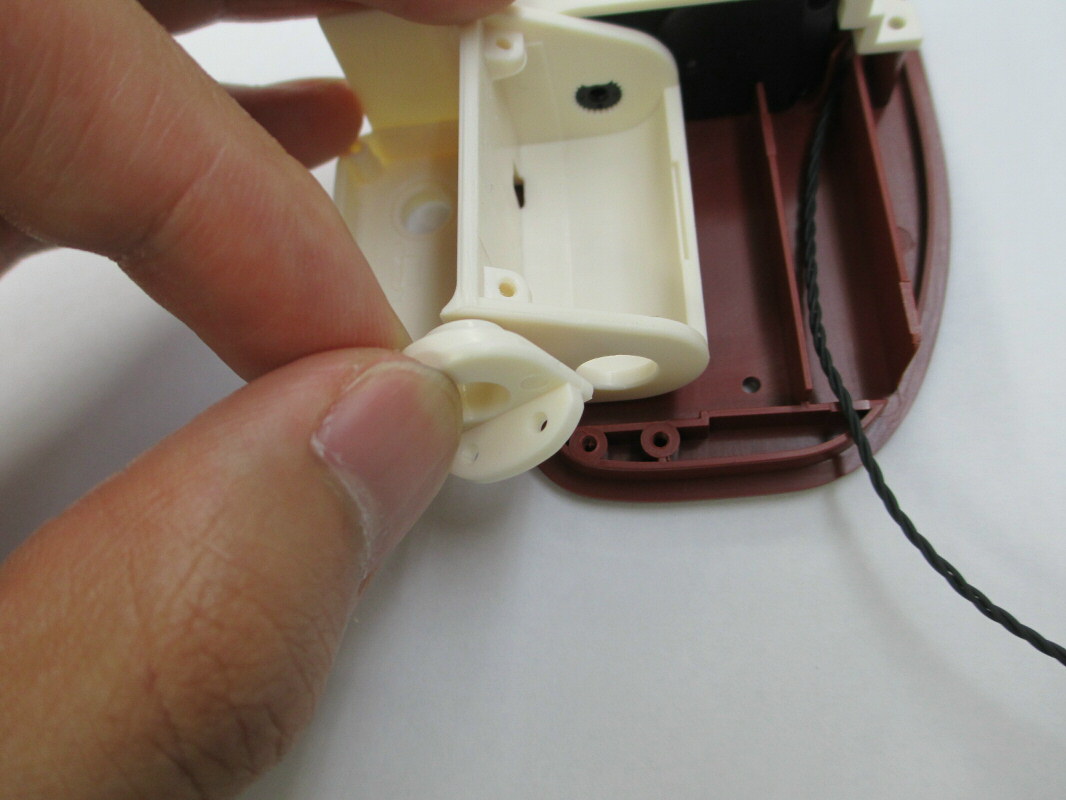
縦回転サーボの裏ブタをはずして配線します。
サーボをフレームにはめ込み、ネジ留め。
ここもケーブルを部品に挟み込まないよう注意です。
前回サーボに巻いたシールの色が、フレームよりも少し濃いのが気になりますかね。......さすがに塗るほどのことでは無いですけども。
足首側の縦回転サーボもくっつけます。
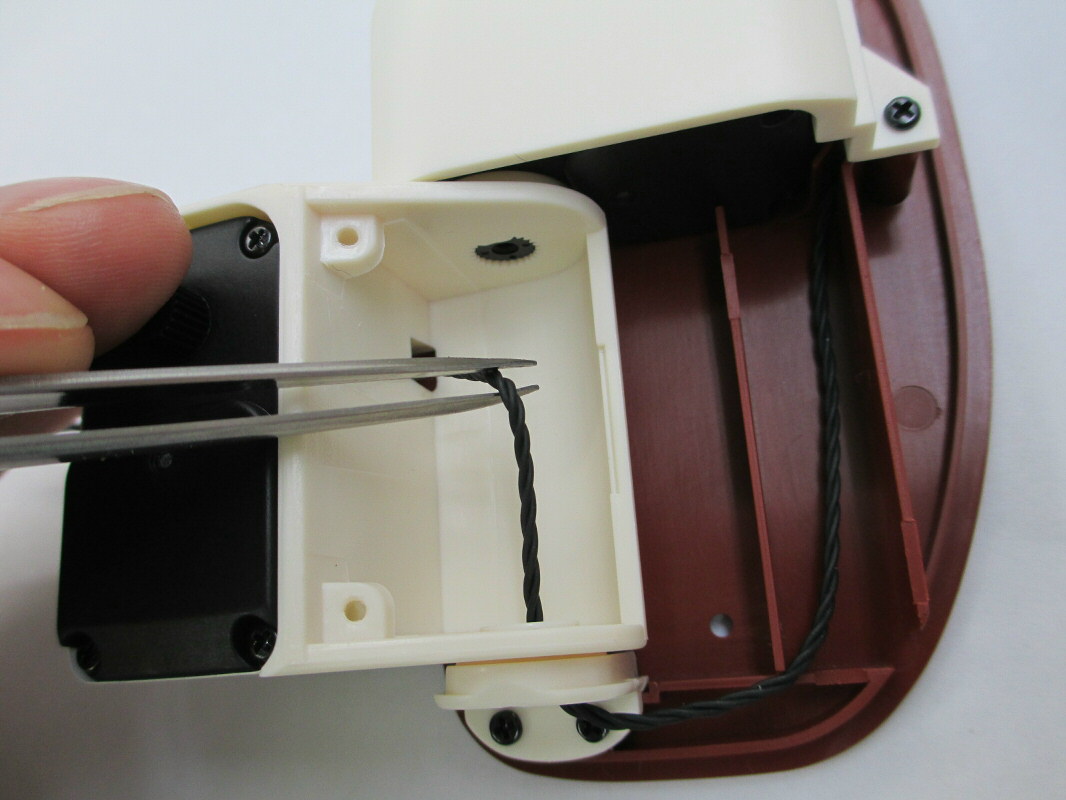
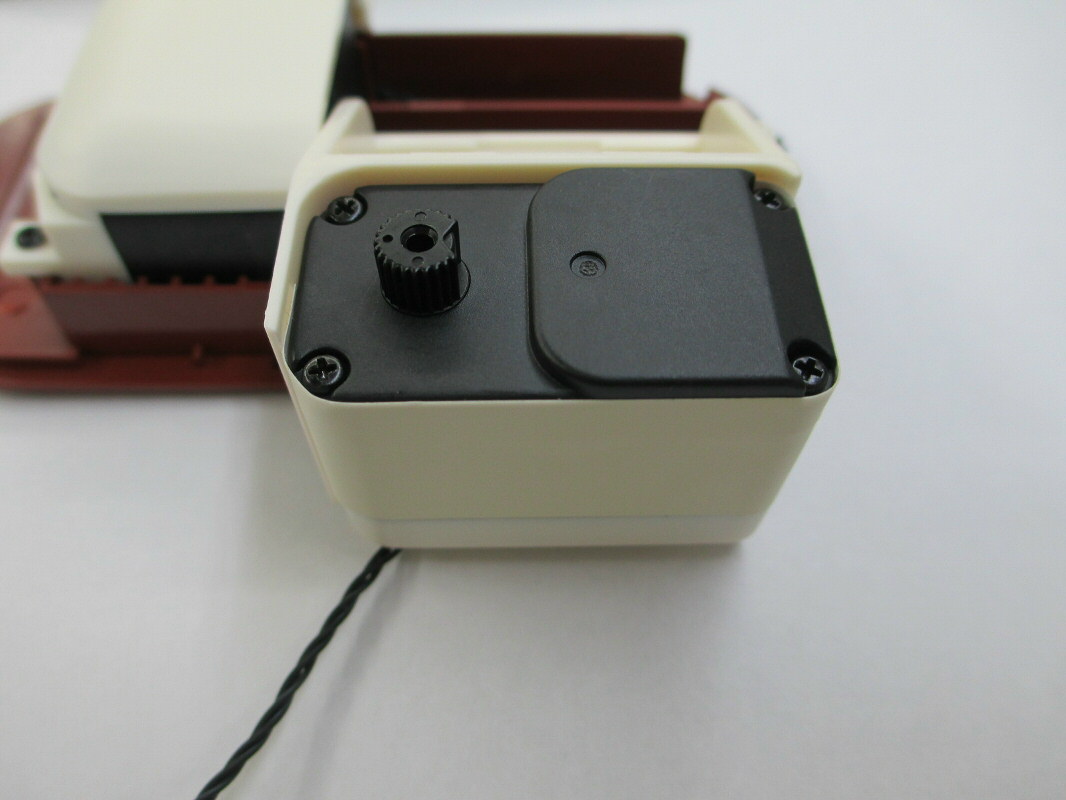
横回転サーボのケーブルを軽く引っ張ってたるみを取ります。
写真を撮る関係上ピンセットを使っていますが、普通に指で引っ張ってもOKです。

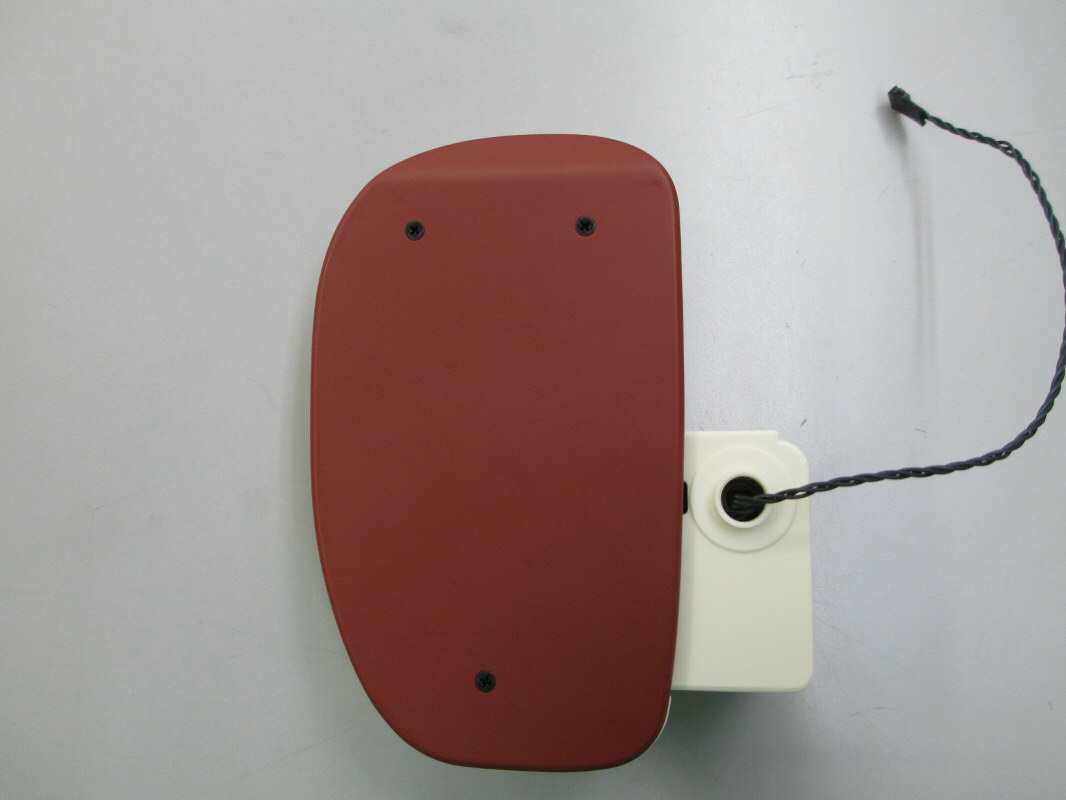
右足カバーを上からかぶせ、裏側からM2×7mm皿ネジを入れて締めます。
裏側には後日フェルトを貼り付けるはずです。
......完成後に、メンテナンス等でこのネジを外す場合はどうするんでしょう。また一つ謎が浮かびました。

足首サイドパネルをフレームに取り付けます。
ここではM2×6mmネジを使います。
足首側の縦回転サーボもくっつけます。

これにて今回の作業は完了です。
一気に右足が形になりました!
今週はちょっと作業が多いですね。写真を撮りながらだと30分近くかかってしまいました。ケーブルを断線させてしまったりすると大変なので、安全第一でゆっくり作業しましょう。
では、また来週!
参考:ディアゴスティーニ・ジャパン公式動画
『第27号 右足首の関節と足を組み立てる』
『第27号 右足首の関節と足を組み立てる』
...次回へ続く!