
【ほぼ週刊企画】Robiをつくる 第30号 ~右ひざ関節の組立~
どうも店員です。
今回のRobi誌面を読んでいたら、6本足ロボット「ヘクサレッグス」の記事に気になるものが。
ロボットの中に積まれているノートPCが、VAIO U「PCG-U3」のような......?
11年も前のモバイルモデルですが、まさか現役でロボットに使われているとは。我ながら変なところに感心してしまいました。
部品確認を忘れない心。

今まずは恒例の部品確認から。
左から順に、右すね内側カバー、右ひざフレーム、ネジです。
一番右のは、前回までに組み立てた右足です。
うっかり撮り忘れましたが、前号でID設定したサーボも使うほか、70mmのサーボケーブルも今回の付属で入っていました。
ケーブルはいつもどおり、保護シールを貼って保管です。
右ひざの間接を組み立てていきます。

手始めに、右すね内側カバーに足首からきているケーブルを通します。
このとき、上下を間違えないように要注意ですね。

内側カバーを通したケーブルを、さらに右ひざフレームの丸穴に通します。
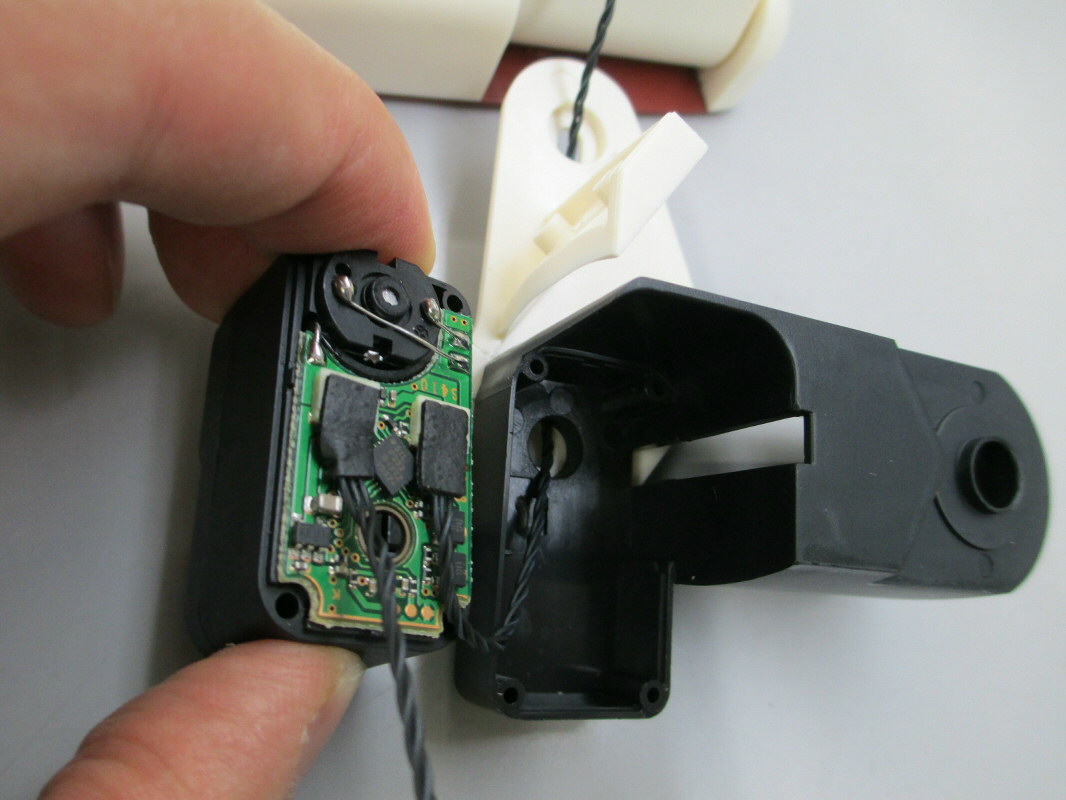
そうして通してきたケーブルを、前号でID設定をしたサーボに繋ぎます。
実際には、ケーブルは写真とは左右逆にしたほうが良いと思います。
このままだとケーブルがフレームの中で交差しちゃいますので、なるべくケーブル同士が干渉しない方が良いんじゃないかな、と。
配線をしたら、短いほうのケーブルをひざフレームの細長いスリットに通します。ここから腿のサーボに繋げていくわけですね。

サーボを右ひざフレームにはめ込んでいきます。
ケーブルをフレームで噛まないように、軽く外に引っ張りながらはめます。

そしてサーボについていたネジで固定します。
足とひざを合体!大きくなる部品!

お次に足とひざを合体させます。
サーボの出力軸を、すね外側フレームに挿し込みます。
なるべく垂直に力がかかるように気をつけましょう。

内側フレームを右足首とひざフレームに合わせて、ネジ留めをすれば完成です。
今回はここまで!

というわけで、今回の成果がコチラ。
脚は配線の通し方が面白いので、組んでいて楽しいですね。
では、また来週!
参考:ディアゴスティーニ・ジャパン公式動画
『第30号 右ひざの関節を組み立てる 』
『第30号 右ひざの関節を組み立てる 』
...次回へ続く!