
【ほぼ週刊企画】Robiをつくる 第52号 ~腰に両脚を取り付ける~

Robiを作り始めてはや1年が経ちました。
いやぁ長かった。まだ完成してませんけども。
まだあと4か月! みなさまお付き合いください。
あ、あと最近CMをやっているのでご存知だと思いますが、Robiが再刊行されております。
デアゴスティーニの他のもので再刊行って聞いたことないんですけど、今までもあったんでしょうかね。
なんにせよユーザーがさらに増えるのは嬉しいことですね。
そして出来ればデアゴスティーニさんはスペアパーツでサーボケーブル出してくれると更に嬉しいデース。
謎の黄色いボールが!

今回は変わった付属品としてボールがありました。
これでRobiが何をしてくれるのか、気になりますねー。
使うのは完成してからなので、これはしまっておきます。
他には腰フレーム、下腹カバー、ネジが付いてきます。
前号までの部品では、両脚とヒップカバーを使います。
両足を腰に合体させていくのです!

まずはヒップカバーに両脚のサーボ出力軸を挿しこみます。
脚がこうしてハの字になるロボットって初めて見た気がします。

これが今回の新パーツ、腰フレームです。
サーボケーブルや充電ケーブルを通す穴が開いています。

ケーブルを通して取り付けるとこうなります。
固定方法は上面後方のネジ穴2点留めです。
うーむ、無駄がなく良くできた部品ですね。

続いては下腹カバー。名前の通り、配線を隠すカバーです。
上の2つの穴に腰フレームの突起をはめたらネジ留めという手順で取り付けます。
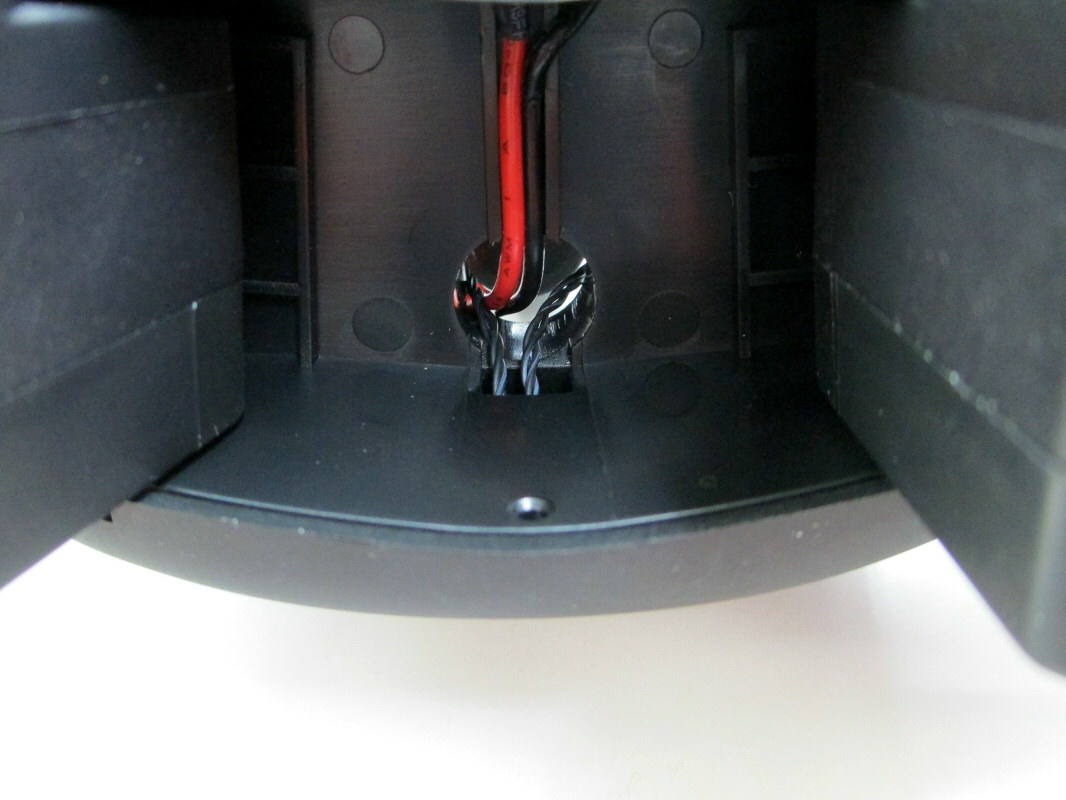
下腹カバーは裏側からネジ留めを行います。写真下にあるのがネジ穴です。
使うネジは腰フレーム取付と同じですが、ネジに対してドライバーが垂直にできず力をまっすぐにかけられません。
ネジが穴に対して垂直になるように&ネジ山をナメないように意識しながら回しましょう。
ついでに充電ケーブルを腰フレーム裏にある溝に押し込みます。弛んでいると動作の妨げになるかもしれませんので忘れずに。

これで今回の作業は終了です。
出来上がったものがこちら。
作業量の多い号ではありませんでしたが、一気に進んだような気分です。
というわけでまた来週!
参考:ディアゴスティーニ・ジャパン公式動画
『第52号 腰の部分に両脚を取り付ける』
『第52号 腰の部分に両脚を取り付ける』
...次回へ続く!