
【ほぼ週刊企画】Robiをつくる 第14号 ~ボディに右腕を取り付ける~

どうも店員です。
最近になって気づいたのですが、KHR-3HVを改造して色々チャレンジしているDr.Guero氏が新しいロボット動画を公開していました。
今回は自然な歩行をさせてみたということです。一見の価値ありですよ!詳しくはDr.Guero氏のHPをご覧ください。
部品の確認を忘れない心。


まずは部品の確認です。
今回の付属は右ボディカバー、サーボホーン(肩用)、ネジの3つです。
付属部品のほか、右腕と前号のサーボを使います。
取り付け開始!ホーンの逆挿しに注意!
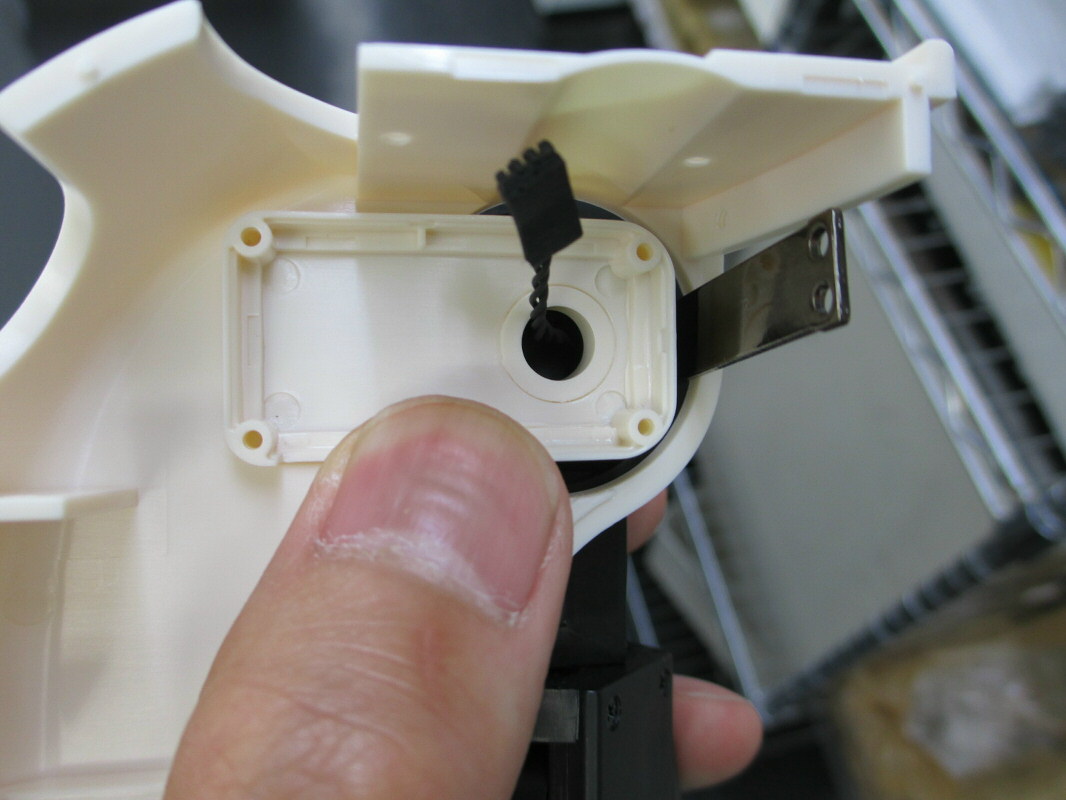
右腕のケーブルをボディの丸穴に、連結金具をスリットに通します。
もうこの時点で肩の謎が解けましたね。
やはり連結金具とサーボの出力軸を繋ぐようです。


サーボホーンをサーボの出力軸にはめ込みます。
ホーンには裏表があり、上の画像は表側です。
はめようとすれば途中までははまりそうなので、注意してください。
間違えると引っこ抜くのが大変です。
はめると右下の画像通りになります。
なお、ホーンはネジ留めしません。
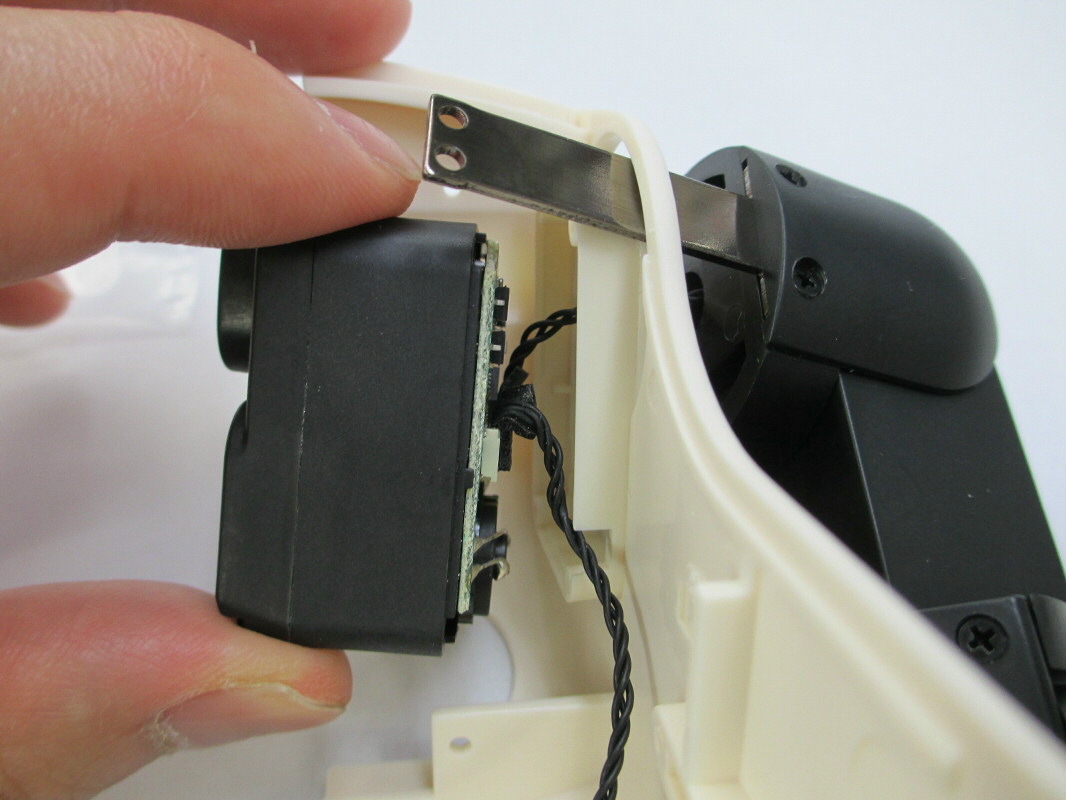
肩サーボの裏ブタを外して、ボディと合わせていきます。
右腕のケーブルを肩サーボの空き端子につなぎます。取り回しを考えると、上にくる端子に繋ぐのが良いでしょう。
肩サーボから出るケーブルは、ボディ側の切り欠きに通します。ケーブルを噛まないように注意しながら、しっかりはめ込みましょう。
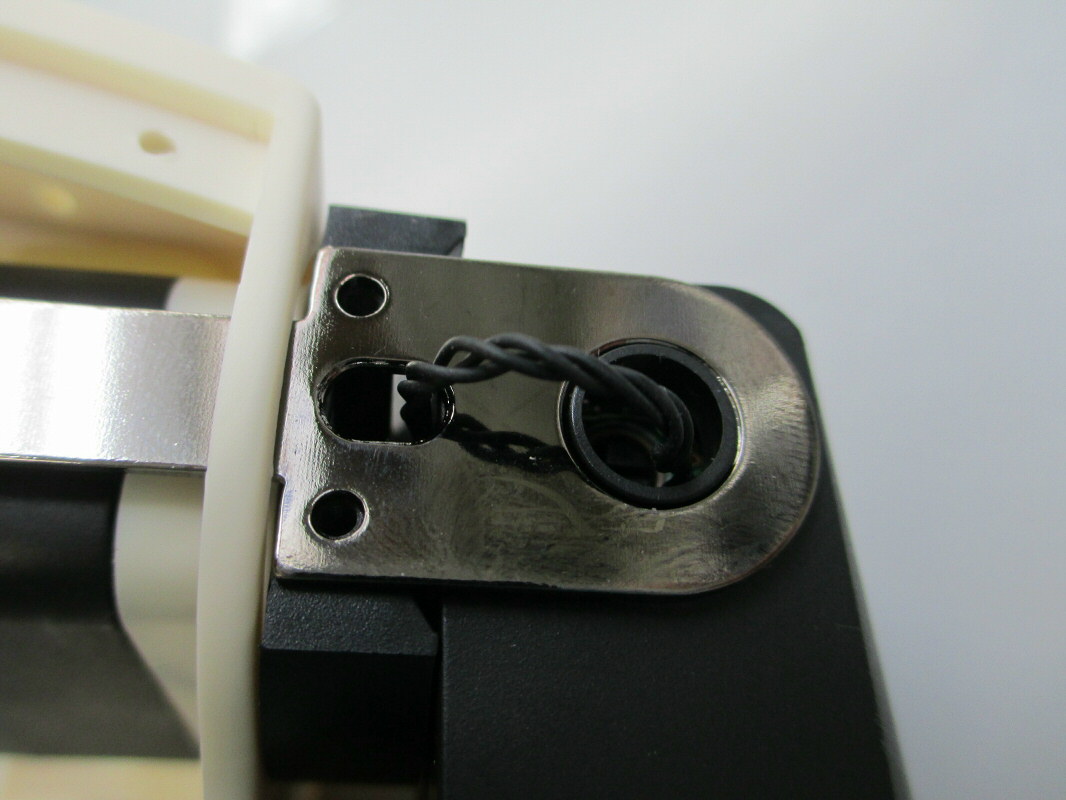
連結金具とサーボホーンをネジ留めします。
このネジは腕を支える重要な部分ですので、しっかり締めましょう。
まだ肩サーボが固定されてないのでちょっと締めにくいかも。
後で軽く増し締めするのが良いかもしれません。
そーっとケーブルの整理をします。
ここで断線を防ぐために配線の調整です。
肩パネルを取り外してボディ側に行き過ぎているケーブルを引っ張り出します。端子から抜けないようにゆっくり慎重に。
引っ張り出した分は右腕肩フレームの穴に押し込みます。指だとやりにくいので、ピンセットがあると良いでしょう。
連結金具の上にもたるみが無いようにピンと張ったら、肩パネルを元に戻します。
ネジ留めをして完了!

最後に肩サーボとボディをネジ留めします。
ここも腕の重量がかかる大事なところ。しっかり締めましょう。
締めたらネジ頭が浮いていないか確認してください。

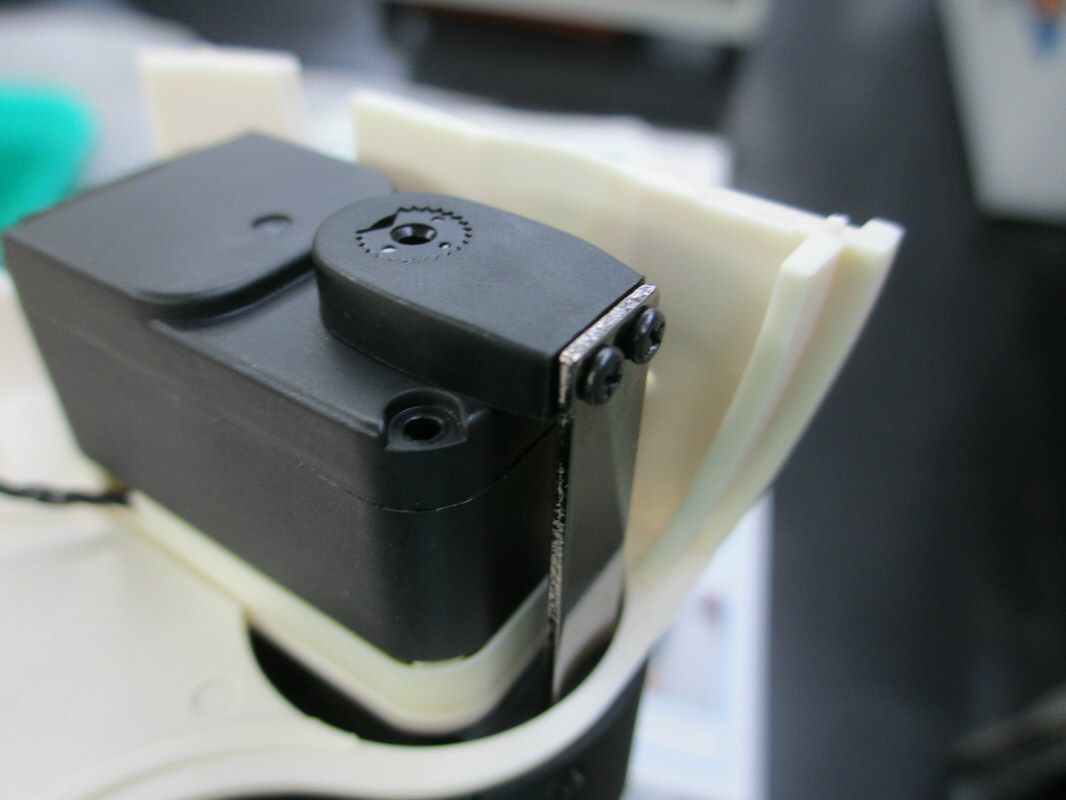
ちなみにRobiの肩は軸が水平ではありません。
画像のとおり、少し傾いています。
これも他のホビーロボットと違うポイントですね。
今号の作業はここまで。

今回はここまで。
右上半身が出来ました。
来週からは左腕らしいです。
まずは上半身を作っていくみたいですね。
では、また来週!
参考:ディアゴスティーニ・ジャパン公式動画
『第14号 右ボディに右腕を取り付ける』
『第14号 右ボディに右腕を取り付ける』
...次回へ続く!